Automated Removal with the Right Gripper Concept
Injection moulded parts can have simple, flat or very complex shapes. Accordingly, the end-of-arm-tool (EOAT) must be constructed in an automatic unloading process. Piab’s new department Robotic Gripping specialises in developing gripping concepts for these different levels of complexity.
Plastic injection moulded parts are used in a wide range of applications, ranging from simple flat geometries to highly complex curved geometries. The aim of manufacturing these components is to maximise the automation of the manufacturing process to minimise cycle times, reduce costs, and ensure consistent quality standards. The automatic unloading of finished components plays an essential role and places high demands on the design of the end-of-arm tools (EOATs).
With the acquisition of SAS and Feba Automation Piab combines the best of two worlds of gripper construction and can offer both grippers based on standard square profiles as well as round profiles, depending on the component and the customer’s request.
Rectangular profiles are preferably used in simple or flat component geometries, which are removed on the core side. At this form of removal, the demolding of the component from the tool is carried out via ejector systems. For removal, the component can be picked up from the ejector pins or ejector units with simple components such as suction cups or folding fingers and sprue grippers. A fully automatic removal with sprue separation is possible.
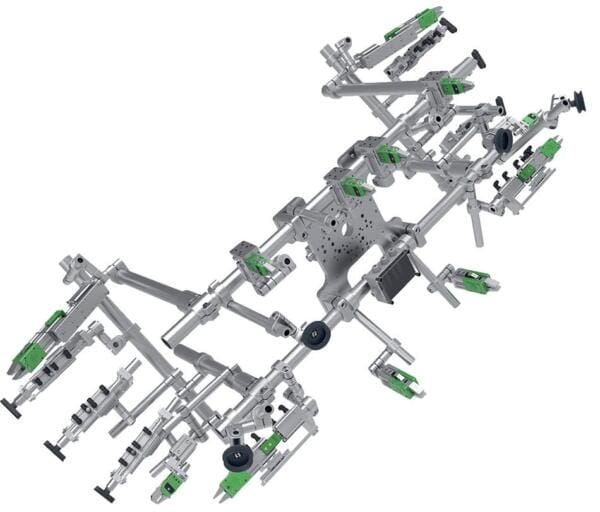
Piab’s gripper concept based on round profiles comes to wear especially for complex, geometry-strong components, such as those used in the automotive industry, i.e. for bumpers, which are removed on the cavity half – on the nozzle side. It allows greater flexibility in terms of the positioning of the components on the gripper.
The lower weight of the gripper protects the mechanics of the robot and reduces its susceptibility to interference. Correspondingly, higher payloads or the use of a smaller robot are possible.
“The matrix side gripper carries out the demolding from cavity half of the tool. In the meantime, the gripper must actively deform the component via gripper lifting units and movable vacuum units in order to be able to mould it from the undercuts on the tool side. In this case, stress whitening or scratches on A-surface of the component – the visible side of the part – must be avoided at all costs, as they continue to be more visible after further process steps such as painting or galvanising and thus usually do not pass quality control processes.“, explains Felix Geuecke, Managing Director of PIAB’s Robotic Gripping production site in Schmallenberg.
As specialists in matrix-side grippers, Piab developed extensive know-how to even remove parts with highly complex geometries from the mould without any damage.
A further specific requirement is the extraction of components, which have to be galvanised – to be chromed – later. Any mark or tiny scratches on the chrome surface would be immediately visible. Piab has developed a special gripper for the automated removal of such injection-moulded parts. This gripper docks to the injection moulding tool via special centring units. Flocked contour pieces, which correspond to the negative form of the component, take the component carefully and gently. The component is held in the negative mould on gripper fingers that touch the component only on the non-visible side. In this way, even the most sensitive components can be handled easily and automatically in consistently high quality.
“Generally, we develop each gripper specifically on the basis of customer needs, the robot type used and the requirements imposed by the component. We work closely with our customers and construct each gripper based on the tool and component data provided to us in the CAD system. Depending on the size of the gripper, it is fully pre-assembled at our production site in Schmallenberg, Germany and then completed and put into operation by our service technicians at the customer’s site.“, describes Felix Geuecke the procedure of Piab in the implementation of gripper projects.

piab
01509 857010
Website
Email